The Myth of Non-Determinism: Why Agentic Operations Can Be Predictable, Governed, and Safe

Authored by Wouter Beneke, Marketing Lead at XMPro
There’s a persistent critique about agentic operations: that they’re non-deterministic, unpredictable, and therefore unsafe in industrial environments. The problem is that most debates collapse several unrelated concerns into one blanket statement. This article unpacks those concerns and explains where determinism actually matters — at the decision and action layers, not inside the reasoning loop. If you work in operations, safety, engineering, or industrial AI, this piece clarifies how properly architected agentic systems remain predictable, governed, and safe, even when they use probabilistic models internally.
1. Acknowledging the Valid Concern
The critique comes up in nearly every technical discussion about agentic operations: "These systems are non-deterministic, and therefore unsafe." It's raised by control engineers with decades of experience, safety officers responsible for certified systems, and executives who've seen too many AI pilots fail in production.
The concern is legitimate, especially for heavy industry and mission-critical operations, where non-determinism has real consequences. Engineers trained in functional safety standards rightfully demand predictability, traceability, and reproducibility. When a public demo shows an LLM-based agent making ungrounded decisions or hallucinating facts, it reinforces every worst-case assumption about autonomous systems in industrial environments.
This article isn't an attempt to dismiss those concerns. It's an attempt to clarify the terminology and architecture so we stop talking past each other. The real issue isn't whether agents can be predictable. It's whether the systems we're building are architected to enforce that predictability at the right level.
2. The Misalignment: People Use "Non-Deterministic" to Mean Five Different Things
When someone says "agentic operations are non-deterministic," they're usually bundling several distinct concerns into a single critique:
LLMs are probabilistic. True. Large language models generate outputs based on probability distributions, not deterministic logic.
Agents may take different internal reasoning paths. True. Two runs of the same agent might explore different solution spaces before converging on a decision.
Environment variability forces dynamic responses. True. Industrial systems operate in chaotic, high-variance environments where identical inputs don't guarantee identical conditions.
Multi-agent systems can create branching decision pathways. True. When multiple agents coordinate, negotiation patterns can vary based on timing, priority, and context.
Black-box behavior leads to trust concerns. True. When decision logic is buried in prompt engineering or opaque model weights, operators lose visibility into why a system behaved the way it did.
Regulatory requirements define determinism differently depending on Safety Integrity Level (SIL), domain, and jurisdiction, further mixing the terminology and making it difficult to establish a unified framework across industries.
These are all valid observations. But here's the key premise they're missing: these concerns only matter when the architecture does not separate deterministic reflection from action and does not enforce a deterministic safety envelope.
The problem isn't that agents use probabilistic models. The problem is when those models have unconstrained access to operational decisions.
The Core Misunderstanding: People Assume the LLM Is the Agent’s Brain
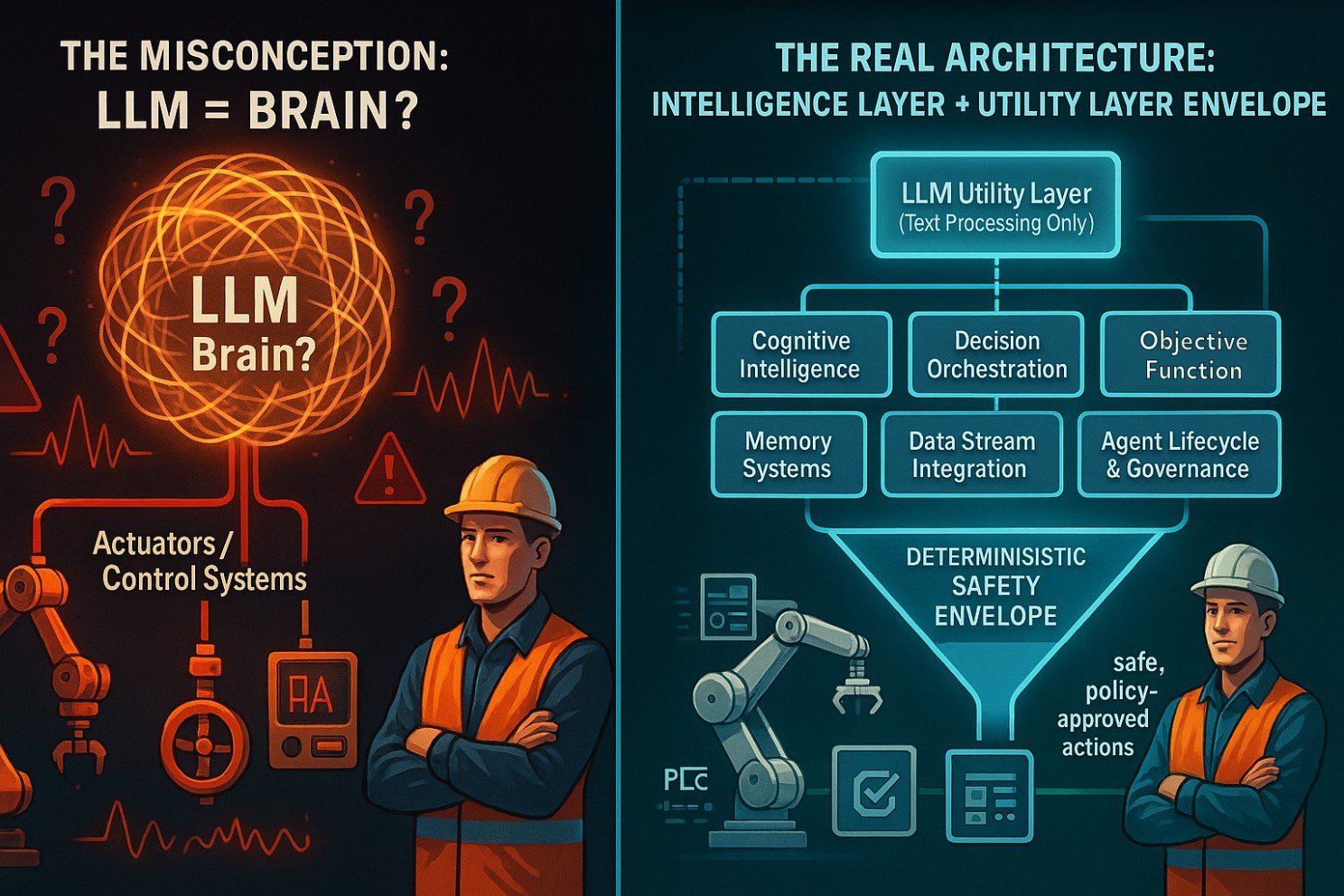
A major reason “non-deterministic” gets weaponized in debates is that many people picture an agent as an LLM acting as the brain, now given tools, APIs, or even physical actuators as its arms and legs. In that mental model, whatever the LLM decides becomes the action — and if that were true, the critics would be right to be terrified.
But this isn’t how real agentic systems work, especially not in industrial environments.
In enterprise-grade architectures, the LLM sits in the utility layer, not the intelligence layer. It performs language tasks: summarising context, processing documents, generating explanations. The actual “brain” of the agent, the part that interprets objectives, reasons about constraints, manages memory, evaluates tradeoffs, coordinates with other agents, and determines what actions are even possible... is built almost entirely on business process intelligence, not generative modeling.
In XMPro’s own implementation, more than 92% of agent intelligence is deterministic logic, objective functions, memory systems, and coordination protocols. The LLM contributes about 8%, and none of that 8% drives operational decisions.
The misconception that “the LLM is the brain” fundamentally confuses a text-generation tool with the governed cognitive architecture around it. Agentic operations fail only when this architecture is absent, not when LLMs are involved. The real issue isn’t probabilistic reasoning; it’s whether you’ve built an agentic system where reasoning is separated from action and where the safety envelope is enforced by design.
3. Correcting the Term: Determinism at the Right Layer
We need to be more precise about where determinism actually matters in industrial systems.
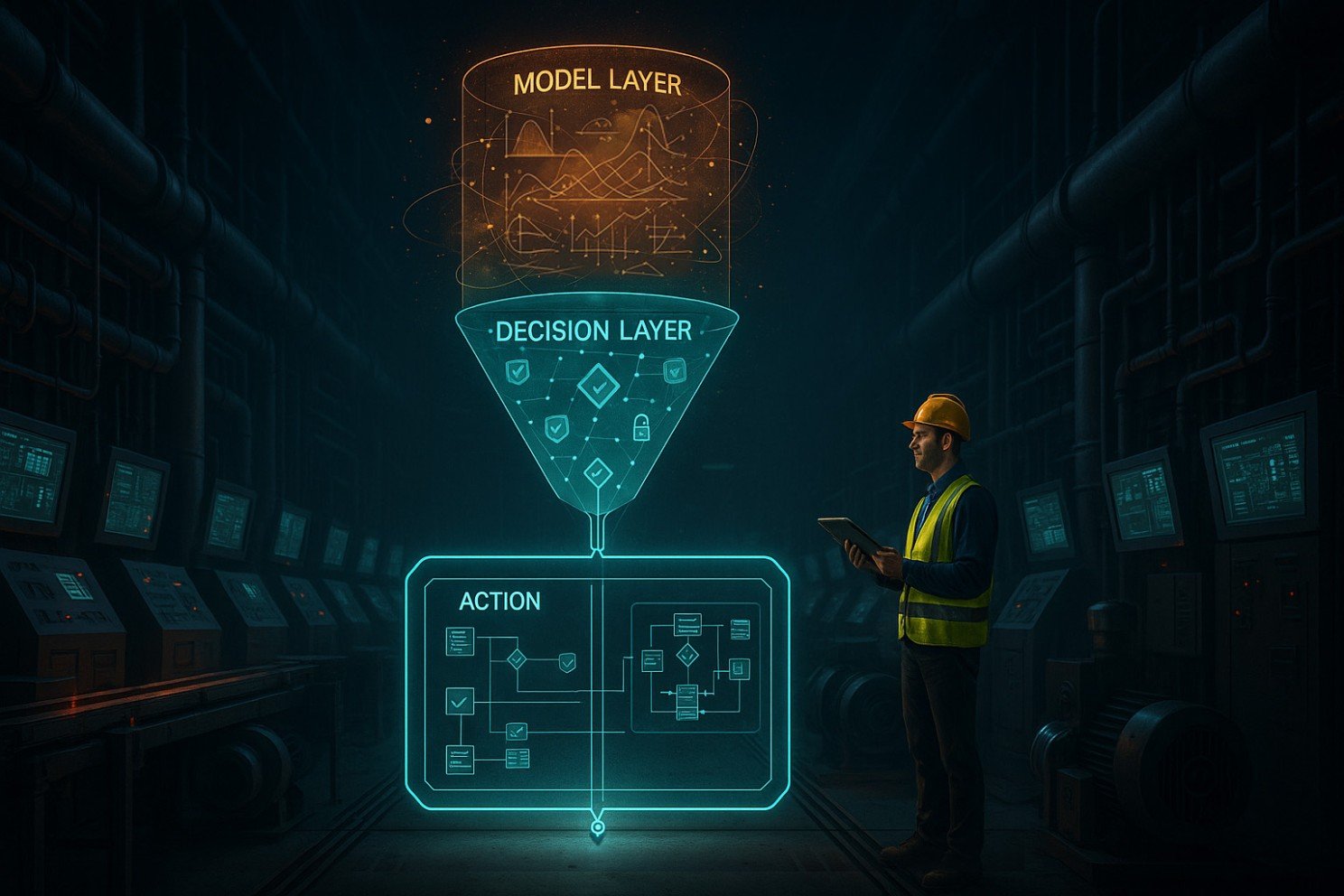
Model-level determinism refers to whether internal reasoning produces identical outputs given identical inputs. At this level, some non-determinism is acceptable and often desirable. Stochastic optimization, Monte Carlo methods, and reinforcement learning all introduce variability at the model level while remaining perfectly useful in production.
Decision-level determinism means the allowable action set is bounded, governed, and policy-driven. An agent might explore different internal reasoning paths, but the final decision must fall within a pre-defined, safe set of options. This is where governance lives.
Action-level determinism means all operational actions (dispatching work orders, adjusting setpoints, triggering alerts, optimizing schedules) must be reproducible, traceable, and auditable. This is where safety engineering and compliance requirements apply.
The distinction matters. A system can have non-deterministic internal reasoning while maintaining strict determinism at the decision and action layers. Modern safety engineering accepts probabilistic reasoning internally, provided the resulting actions are validated through deterministic policy constraints. This is how modern control systems already work. PID loops adapt continuously to disturbances. Model predictive control solves optimization problems that produce different trajectories under different conditions. But both operate within hard constraints that define what actions are permissible.
This is the concept of a deterministic safety envelope, a term borrowed from aviation and robotics. The internal state of the system can vary. The reasoning process can adapt. But the boundaries are fixed, governed, and enforced at the architecture level.
4. Why Industrial Operations Are Already Non-Deterministic (and Always Have Been)
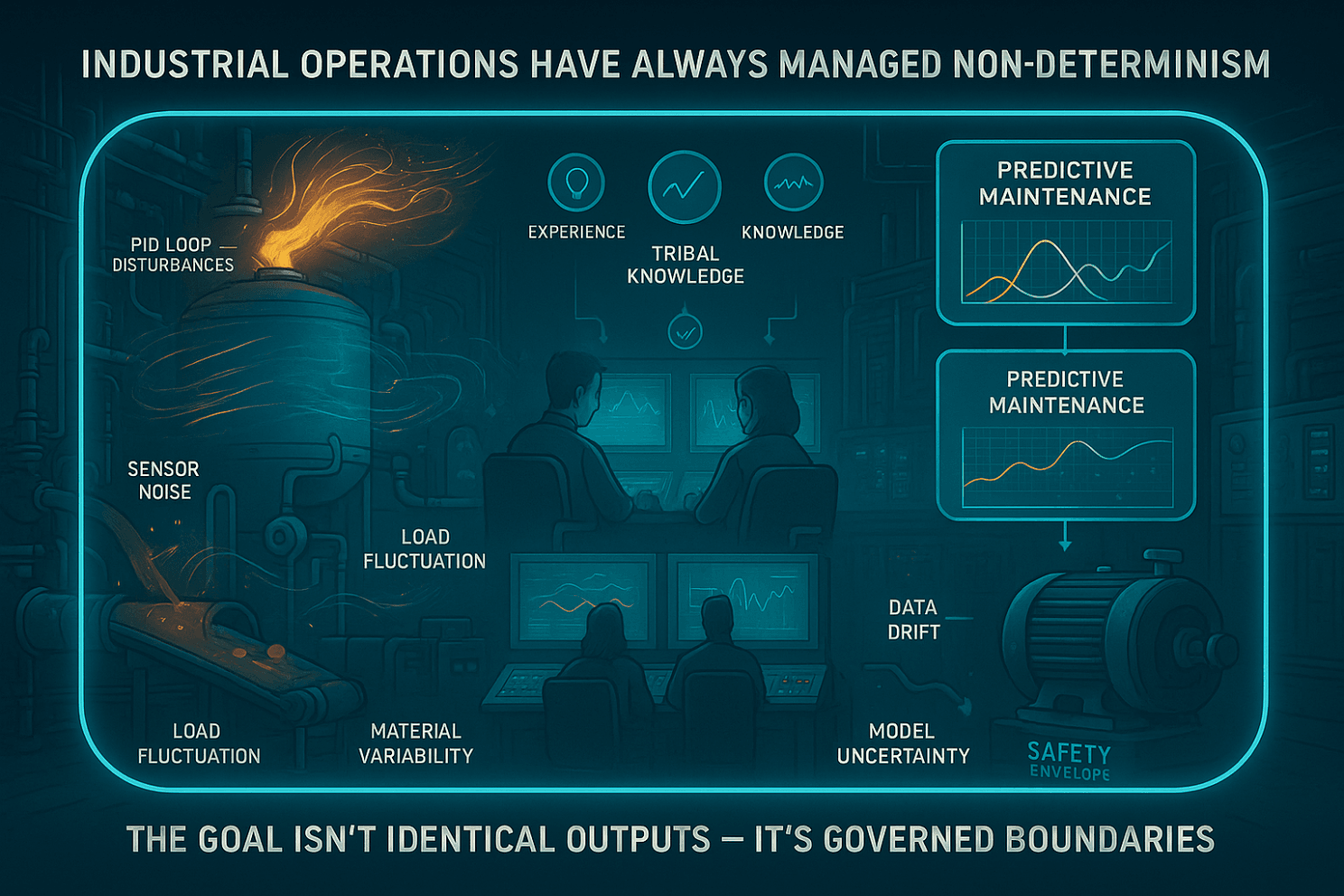
To avoid the impression that we're redefining reality: industrial operations have never been fully deterministic.
Consider the systems already deployed in mining, energy, and manufacturing:
PID loopsadapt continuously to disturbances, and though the algorithm itself is deterministic, the resulting trajectories vary based on initial conditions, real-time perturbations, sensor noise, and load changes. Two identical setpoint changes can produce different control responses depending on system state.
For example, even a tiny shift in load, a burst of sensor noise, or friction in a valve stem is enough to make the responses diverge. The algorithm is deterministic, but the plant isn’t.
Model predictive control (MPC) optimizes over a receding horizon, solving a new optimization problem at every time step. The solution changes based on current constraints, forecast errors, and real-time disturbances.
Human planners and operators make different decisions on different days, influenced by experience, fatigue, tribal knowledge, and situational judgment. The same equipment failure might be handled differently by two equally competent engineers.
Machine learning models for predictive maintenance, quality prediction, and energy forecasting introduce probabilistic outputs that influence operational decisions daily.
Complex process control systems interact with dynamic, nonlinear environments where sensor noise, equipment wear, ambient conditions, and material variability all create unpredictable behavior at the micro level.
None of these systems are deterministic in the strict sense. Yet we trust them in safety-critical environments because they operate within governed boundaries. The goal has never been to eliminate variability. The goal is to govern it within safe, predictable constraints.
Agentic operations simply formalize and extend this principle.
5. The Real Sources of Perceived Randomness in Agents

Let's address each source of perceived non-determinism directly.
5.1 LLM Outputs
Large language models are probabilistic by design. They sample from learned distributions and can produce different responses to identical prompts. This is only dangerous when LLMs are used incorrectly: specifically, when they're allowed to generate numeric decisions, set thresholds, or directly control equipment.
In a properly architected system, LLMs serve a narrow role: summarizing context, explaining decisions, translating technical outputs into natural language, and synthesizing information for escalation. They do not determine what actions are safe. They do not replace rules, physics models, or domain expertise. Critically, LLM outputs never feed directly into actuation or numeric control pathways; symbolic reasoning is always gated by deterministic validators.
5.2 Environmental Variability
Industrial environments are inherently chaotic. Two haul trucks with identical maintenance schedules and payload histories will behave differently based on operator technique, road conditions, temperature, and countless micro-level factors. Sensors drift. Equipment wears non-uniformly. Weather changes.
Agents responding to this variability aren't introducing randomness. They're reacting to randomness that already exists. The question is whether their responses are bounded and governed, not whether they're identical every time.
5.3 Multi-Agent Coordination
When multiple agents collaborate (say, optimizing energy use across a plant or coordinating maintenance schedules across a fleet), they may negotiate different solutions depending on timing, priority conflicts, and resource availability. This can look non-deterministic from the outside.
But if the agents operate under consensus protocols, shared constraints, and escalation rules, the internal negotiation pathways don't matter. What matters is that the final agreed-upon action falls within the allowable decision space. Coordination frameworks must explicitly include deadlock avoidance, conflict resolution, and global constraint validation to ensure predictable outcomes.
5.4 Hidden Heuristics and Prompt-Based Agents
This is the real source of dangerous non-determinism: systems where decision logic is embedded in natural language prompts, where rules are implied rather than enforced, and where there's no clear separation between reasoning and action.
Prompt-led agents without structural constraints are not suitable for industrial operations, because they lack enforceable boundaries and produce untraceable logic paths. The logic is opaque, the boundaries are vague, and the behavior is unpredictable.
These systems should never be used for industrial autonomy. They're the source of most valid criticisms about agentic operations.
6. How Enterprise-Grade Agentic Operations Eliminate Dangerous Non-Determinism
The distinction between badly designed agents and properly governed agentic systems comes down to architecture.
6.1 Composite AI Instead of LLM-Led Agents
Enterprise agentic systems don't rely on large language models for operational decisions. They use composite AI: a layered approach where different models serve different purposes:
- Deterministic models (rules, state machines, constraint solvers) enforce policies and boundaries
- Physics-based models and digital twins provide grounded representations of system state
- Machine learning models (trained on historical data) predict failures, optimize schedules, and identify anomalies
- Causal models support counterfactual reasoning and root cause analysis
- LLMs synthesize context, generate explanations, and support human communication
The source of truth is always the historian, the digital twin, or the governed data pipeline. Never the generative model. LLMs explain. They don't decide.
Composite AI architectures must include verification and validation (V&V) of each component and of their interactions to guarantee predictable behavior across the system.
6.2 Bounded Autonomy
Agents operate within strict boundaries defined by:
- Objective functions that specify what success looks like
- Hard constraints that define forbidden states and actions
- Permission frameworks that limit what agents can do without escalation
- Risk thresholds that trigger human review
- Escalation logic that ensures critical decisions are supervised
- Guardrails that prevent state transitions into unsafe regions
Where uncertainty exceeds thresholds, agents must revert to safe fallback states or escalate immediately. These boundaries aren't suggestions. They're enforced at the architecture level, not the prompt level.
6.3 Separation of Reflection from Action
This is the core design principle that makes agentic operations governable.
Reflection (the process of interpreting data, identifying patterns, generating hypotheses, and exploring solution spaces) can be flexible, adaptive, and even probabilistic. This is where LLMs, reasoning engines, and optimization algorithms live.
Action (the process of executing decisions, dispatching work, adjusting setpoints, or triggering alerts) must be deterministic, governed, and traceable. Actions are only executed after passing through a policy layer that validates constraints, checks permissions, and logs decisions.
An agent might reason probabilistically, but it acts deterministically.
6.4 Consensus Protocols
In multi-agent systems, individual agents don't act unilaterally. They propose actions, negotiate constraints, and reach consensus before execution. This prevents race conditions, eliminates emergent chaos, and ensures that the collective decision is always within the safe operational envelope.
Consensus doesn't mean agents vote and override safety rules. It means that all agents must agree that a proposed action satisfies shared constraints before it's executed. Consensus must also account for timing constraints to ensure decisions remain valid under real-time dynamics.
6.5 Digital Twins as Grounding
Agents never "invent facts" or hallucinate system state. They query digital twins: virtual representations of physical assets that are continuously updated with real-time data from sensors, historians, and control systems.
The digital twin serves as the authoritative source of truth. If an agent proposes an action based on faulty assumptions, the digital twin validates the state before execution. This eliminates the risk of agents acting on hallucinated or outdated information.
7. Addressing the Biggest Academic Critique: Safety-Critical Contexts
Let’s be crystal clear about where agents belong in industrial operations. Across all domains, agents operate at the decision-intelligence layer, not the control layer. Their role is to evaluate options, optimize tradeoffs, predict failures, coordinate resources, and recommend or request actions. They do not directly open valves, start pumps, adjust drives, or modify setpoints unless they are themselves part of a certified, safety-rated subsystem.
When an agent proposes an operational action, it flows through a layered safety envelope that ensures determinism at the execution layer:
- Decision-intelligence envelope (agent layer): The agent can only propose actions within a governed, bounded decision space: allowable setpoint ranges, valid operating modes, maintenance windows, resource constraints, and risk thresholds. Anything outside policy is rejected before it ever leaves the agent layer.
- Control-system envelope (PLC/DCS/SCADA layer): The control system evaluates the proposed action against its own certified constraints—interlocks, permissives, alarm states, hardware limits, and deterministic logic. If the action violates any of these rules, the controller rejects it automatically, exactly as it would reject an unsafe human command.
- Safety-instrumented envelope (SIS/SIL layer, where present): Even after the control system accepts an action, an independent safety instrumented system enforces hardwired protective limits and provides a final veto. This ensures that no upstream agent or control logic can drive the plant into a hazardous state.
This layered gating model means agents never bypass the deterministic, safety-validated pathways that already govern physical actuation. They think, they reason, they synthesize... but the control layer executes and the safety layer protects.
Agents do not replace certified control systems. They do not bypass PLC logic. They do not override SIS logic. In every industrial environment, regulated or not, the architecture enforces a strict separation: agents observe, reason, and propose; control and safety systems execute, protect, and enforce.
Autonomy happens in the decision layer. Deterministic actuation happens in the control and safety layers. The boundaries are architectural, not optional.
8. Reframing the Debate: The Wrong Fear Is Blocking the Right Progress
The real risk isn't non-determinism. The real risk is ungoverned autonomy: systems that lack clear boundaries, transparent decision logic, and enforceable constraints.
Badly designed agents are dangerous. But so are badly designed control systems, uncalibrated alarms, and poorly maintained equipment. The solution isn't to ban adaptive systems. The solution is to architect them correctly. Predictability is created through architecture, not through monolithic determinism.
Here's the insight that shifts the conversation: agentic operations can increase predictability by eliminating sources of human variability: decision drift, tribal knowledge gaps, inconsistent interpretations of the same data, and fatigue-driven errors.
This isn't a claim that agents are superior to human operators. It's an observation that agents are more consistent under load. They don't forget procedures. They don't misinterpret trends differently on different shifts. They don't skip steps when understaffed.
When designed with proper governance, agents don't introduce chaos. They reduce it.
9. Closing: A Call for Better Mental Models, Not More Fear
The industrial sector deserves a precise vocabulary for discussing autonomous systems. Conflating "non-deterministic" with "unsafe" or "unpredictable" obscures the real architectural questions we should be asking.
Safety and autonomy are not opposites. They're complementary when the system is designed with the right separation of concerns, the right governance structures, and the right respect for established safety principles.
The determinism that matters isn't whether an agent's internal reasoning is probabilistic. It's whether the system's behavior (at the decision and action layers) is governed, traceable, and bounded within safe operational envelopes.
We've been building hybrid control systems for decades. Agentic operations are the logical next step in that evolution. The architecture determines predictability, not the choice of AI model.
This isn't a call for blind adoption. It's a call for better mental models, clearer terminology, and more rigorous architectural thinking. The conversation should move from "can agents be safe?" to "what governance structures make them safe?"
The technology is ready. The question is whether the industry is ready to adopt the right frameworks. We don't need systems that make identical decisions every time. We need systems that make bounded, governed, explainable decisions every time.